前回の続きです。点群データを作成するための3Dレーザースキャナー本体と点群処理ソフトについてお話ししました。点群処理ソフトは6つラインナップがありましたが、私のたどり着いた答えは、InfipointsとRecap proの併用です。どのように併用するかは、まずは点群データが出来上がるまでの全体の流れを確認してみましょう。
リンク
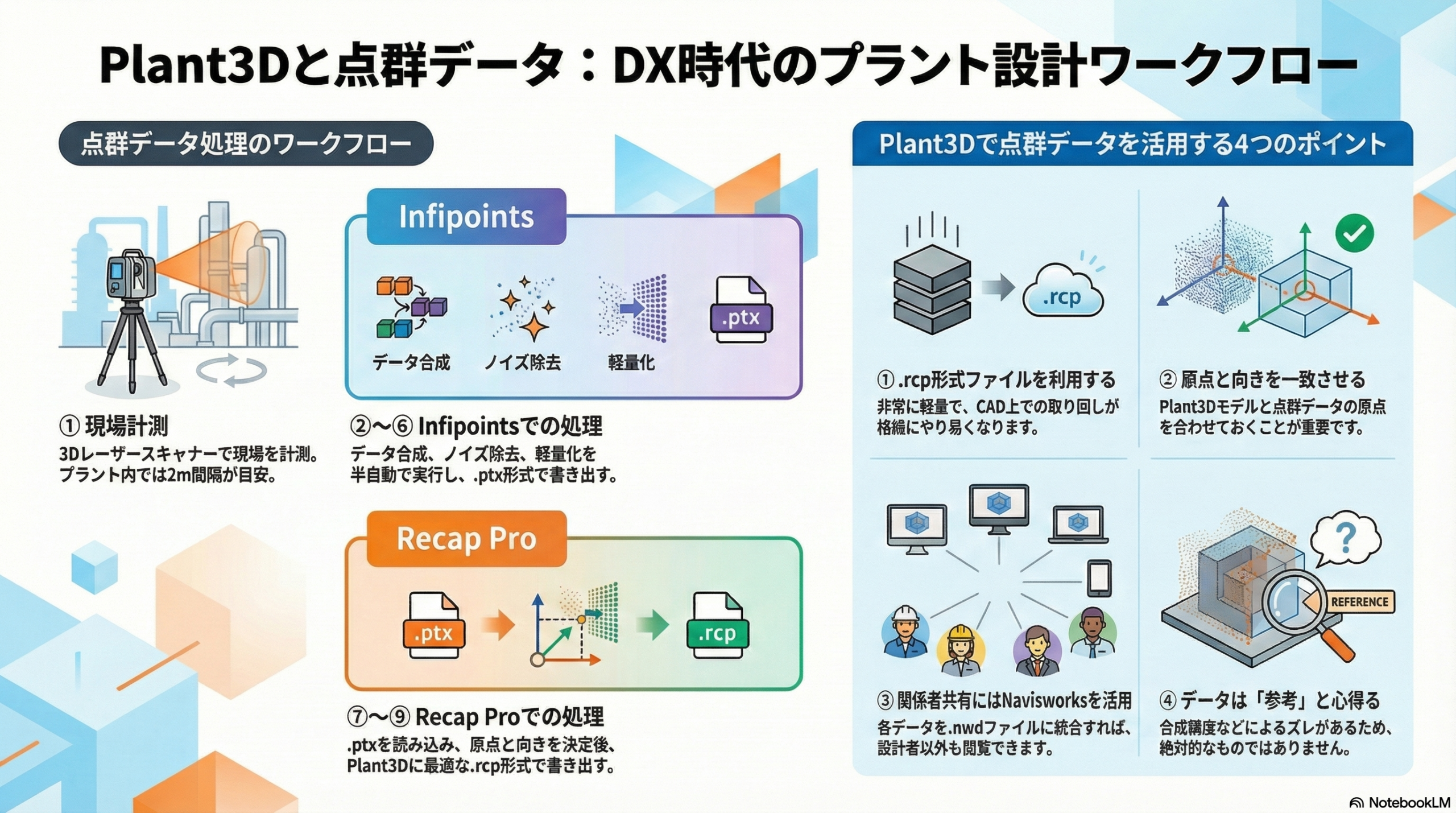
- 現場に行き、3Dレーザースキャナーを使用して点群データを計測。広さにもよるけど、30カ所~100カ所とか。プラントの場合は、現場がごちゃごちゃなので2mピッチぐらいで計測しないと死角だらけになってしまいます。時間は点群精度によるけど大体1カ所2分~5分くらい。
- 点群データをPCへ移す。PCでInfipointsを開き、すべての点群データをインポート。
- 点群データを合成させる。(レジストレーションとか言われてます)
- 点群データでノイズカット処理。(不要な点を削除します)
- 点群データで点を間引く。(データ軽量化のため)
- 点群データを.ptx形式でエクスポート。ここまでがInfipointsの処理。
- PCでRecap proを開き、6のデータをインポート。
- 点群データの原点位置と向きを決める。
- 点群データを.rcp形式でエクスポート。
3~5までの点群処理機能がInfipointsはとても優秀で、半自動(一部手動でやらないとダメな時もあります)で、実施できます。8の原点位置と向き決めもInfipointsでやってしまってもよいかもしれません。そしてPlant3Dで点群データを扱うときは.rcpデータが非常に軽量で使い勝手が良いです。7~9は、極論データ形式を変換するために使っているという感じです。
※最近のアップデートで、Infipointsが.rcp形式でエクスポートできるようになりました。
まとめ
Plant3Dで点群データを扱う場合は以下のことを意識しておくとよいでしょう。
- 点群データは.rcpファイルにする。(非常に軽量でCAD上での取り回しがやり易い)
- Plant3D上の原点(と向き)と点群データの原点(と向き)を合わせておく。
- 設計者以外の人も閲覧するにはそれぞれのデータをNavisworksで結合して.nwdファイルにする。
- 点群データは、スキャナー本体の機械的精度は非常に高いが、実際には合成精度や複数計測によるぶれ精度などがあるので、現実的には参考程度に留めておく。(特に距離がある場所では、角度精度によるずれが大きいです。)
ナナ
以前のスケール(メジャー)とノートでの現場スケッチと比較したら物凄い業務効率化だニャ!
リンク


コメント